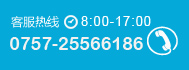



工業(yè)4.0智能制造生產(chǎn)線(xiàn)實(shí)訓(xùn)系統(tǒng),是對(duì)工業(yè)現(xiàn)場(chǎng)大型設(shè)備進(jìn)行提煉和濃縮的一款小型智能制造生產(chǎn)線(xiàn)實(shí)訓(xùn)設(shè)備,專(zhuān)門(mén)為職業(yè)院校、教育培訓(xùn)機(jī)構(gòu)等而研制的,它適合機(jī)械制造及其自動(dòng)化、機(jī)電一體化、電氣工程及自動(dòng)化、控制工程、測(cè)控技術(shù)、計(jì)算機(jī)控制、自動(dòng)化控制等相關(guān)專(zhuān)業(yè)的教學(xué)和培訓(xùn)。


一、智能制造生產(chǎn)線(xiàn)介紹
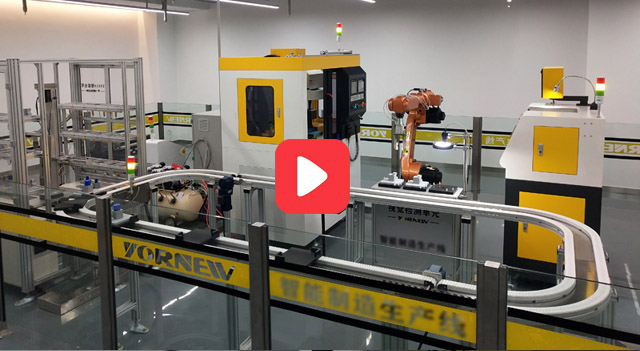
工業(yè)4.0智能制造生產(chǎn)線(xiàn)實(shí)驗(yàn)平臺(tái)主要應(yīng)用于學(xué)生應(yīng)用實(shí)踐類(lèi)教學(xué)。它將各分散的學(xué)習(xí)要素集中起來(lái),組成一個(gè)能夠讓學(xué)生參與設(shè)計(jì)、構(gòu)建和調(diào)試,讓更多老師參與研發(fā)、設(shè)計(jì)和學(xué)習(xí),讓設(shè)備不斷更新、技術(shù)不斷前進(jìn)的系統(tǒng)。所要研發(fā)的系統(tǒng)能夠?yàn)閷W(xué)生提供了一種嶄新的綜合實(shí)驗(yàn)平臺(tái),使他們能夠綜合運(yùn)用所學(xué)知識(shí)設(shè)計(jì)、構(gòu)建各種較大規(guī)模的自動(dòng)化生產(chǎn)系統(tǒng)模型。這種全新的實(shí)驗(yàn)?zāi)J绞纸?jīng)濟(jì)地?cái)U(kuò)展了實(shí)驗(yàn)設(shè)備,對(duì)培養(yǎng)和提高大學(xué)生的創(chuàng)新精神和創(chuàng)新能力具有非常重要的價(jià)值。工業(yè)智能制造示范線(xiàn)以模塊化大大的提高了其靈活性,更貼近現(xiàn)實(shí)生產(chǎn)實(shí)際過(guò)程,讓學(xué)生在學(xué)校就能夠了解實(shí)際生產(chǎn)實(shí)踐的細(xì)節(jié),填補(bǔ)了產(chǎn)學(xué)同步的空白。綜合了現(xiàn)代實(shí)際生產(chǎn)中較流行、較先進(jìn)的各種實(shí)用技術(shù)知識(shí)點(diǎn),其中包括PLC編程技術(shù),網(wǎng)絡(luò)通訊技術(shù),電氣控制技術(shù),氣動(dòng)應(yīng)用技術(shù),傳感器技術(shù),伺服驅(qū)動(dòng)控制技術(shù),機(jī)器人應(yīng)用技術(shù)等。
采用了模塊化的設(shè)計(jì),學(xué)生可以發(fā)揮自己的創(chuàng)新思維,對(duì)原有的生產(chǎn)流程進(jìn)行創(chuàng)新改造。在掌握基礎(chǔ)知識(shí)的前提下,進(jìn)一步提高學(xué)生的積極性、動(dòng)手能力和創(chuàng)新思維。



二、智能制造生產(chǎn)線(xiàn)實(shí)訓(xùn)方案特點(diǎn)
智能制造生產(chǎn)線(xiàn)實(shí)驗(yàn)平臺(tái),是對(duì)工業(yè)現(xiàn)場(chǎng)大型設(shè)備進(jìn)行提煉和濃縮的一款小型智能制造生產(chǎn)線(xiàn)實(shí)訓(xùn)設(shè)備,專(zhuān)門(mén)為職業(yè)院校、教育培訓(xùn)機(jī)構(gòu)等而研制的,它適合機(jī)械制造及其自動(dòng)化、機(jī)電一體化、電氣工程及自動(dòng)化、控制工程、測(cè)控技術(shù)、計(jì)算機(jī)控制、自動(dòng)化控制等相關(guān)專(zhuān)業(yè)的教學(xué)和培訓(xùn)。融合了數(shù)控機(jī)床加工、光、電、氣,包含了PLC、機(jī)器人、傳感器、氣動(dòng)、工業(yè)控制網(wǎng)絡(luò)、電機(jī)驅(qū)動(dòng)與控制、計(jì)算機(jī)等諸多技術(shù)領(lǐng)域,對(duì)柔性制 造技術(shù)的工作過(guò)程進(jìn)行研究,監(jiān)控系統(tǒng)、主控PLC和下位PLC通過(guò)網(wǎng)絡(luò)通訊技術(shù)構(gòu)成一個(gè)完整的多級(jí)計(jì)算機(jī)控制系統(tǒng),通過(guò)訓(xùn)練,使學(xué)生了解智能制造生產(chǎn)線(xiàn)的基本組成和基本原理,讓學(xué)生全面掌握機(jī)電一體化技術(shù)的應(yīng)用開(kāi)發(fā)和集成技術(shù),幫助學(xué)生從系統(tǒng)整體角度去認(rèn)識(shí)。為信息學(xué)院自動(dòng)化和電氣工程自動(dòng)化本科及其控制科學(xué)與工程研究生均提供了實(shí)驗(yàn)和科研的平臺(tái)。
三、系統(tǒng)組成簡(jiǎn)介
1、立體倉(cāng)庫(kù)單元
立體倉(cāng)庫(kù)單元的主要功能是為系統(tǒng)提供加工工件原材料和儲(chǔ)存成品件兩大倉(cāng)儲(chǔ)功能,采用三層貨架儲(chǔ)存單元貨物,用相應(yīng)的物料搬運(yùn)設(shè)備進(jìn)行貨物入庫(kù)和出庫(kù)作業(yè)的倉(cāng)庫(kù)。
2、環(huán)型流水線(xiàn)單元
環(huán)型流水線(xiàn)單元主要由鋁合金型材基體、環(huán)行傳輸線(xiàn)、自動(dòng)導(dǎo)向機(jī)構(gòu)、變頻調(diào)速系統(tǒng)、自動(dòng)定位機(jī)構(gòu)等組成。可完成對(duì)工件在不同速度下的輸送,不同工位的自動(dòng)定位,從而大大提高了自動(dòng)環(huán)形傳輸線(xiàn)的工作效率。
3、數(shù)控車(chē)床加工中心單元
數(shù)控車(chē)床加工中心單元采用小型化,占地小,用于整個(gè)工件的軸類(lèi)部份的加工,采用自動(dòng)門(mén)、自動(dòng)裝夾、四工位自動(dòng)刀架、并有工件冷卻加工系統(tǒng),現(xiàn)實(shí)機(jī)加工件無(wú)人化DNC自動(dòng)加工,配置伺服電機(jī)、工業(yè)級(jí)數(shù)控系統(tǒng),精度高。
4、數(shù)控銑床加工中心單元
數(shù)控銑床加工中心單元采用小型化,占地小,用于整個(gè)工件三軸聯(lián)動(dòng)加工。可用于雕刻、數(shù)控鉆、數(shù)控銑等加工工藝,采用自動(dòng)門(mén)、自動(dòng)裝夾等,現(xiàn)實(shí)機(jī)加工件無(wú)人化DNC自動(dòng)加工,配置伺服電機(jī)、工業(yè)級(jí)數(shù)控系統(tǒng),精度高,
5、六自由度機(jī)器人單元
六自由度工業(yè)機(jī)器人、抓取機(jī)構(gòu)、氣爪等組成,主要完成對(duì)工件的提取及搬運(yùn)到各數(shù)控加工單元、AGV小車(chē)搬運(yùn)單元及工件視覺(jué)檢測(cè)單元等。包含旋轉(zhuǎn)(S軸),下臂(L軸)、上臂(U軸)、手腕旋轉(zhuǎn)(R軸)、手腕擺動(dòng)(B軸)和手腕回轉(zhuǎn)(T軸),6個(gè)關(guān)節(jié)合成實(shí)現(xiàn)末端的6自由度動(dòng)作。
6、四坐標(biāo)機(jī)器人
四坐標(biāo)機(jī)器人主要負(fù)責(zé)立體倉(cāng)庫(kù)的原材料入庫(kù)與出庫(kù)、成品零件的入庫(kù)。夠?qū)崿F(xiàn)自動(dòng)控制的、可重復(fù)編程的、多功能的、多自由度的、運(yùn)動(dòng)自由度間成空間直角關(guān)系、多用途的操作機(jī)。他能夠搬運(yùn)物體、操作工具,以完成各種作業(yè),具有高速性的最大化吞吐量,超長(zhǎng)的工作運(yùn)行時(shí)間,節(jié)省地面空間。
7、視覺(jué)檢測(cè)單元單元
檢測(cè)單元的主要功能是對(duì)工件的精度、外觀形狀品質(zhì)是否合格,通過(guò)攝像頭獲取工件的圖像,由圖像處理器完成工件合格與否的判斷,將不合格工件剔除,將合格的工件傳送至下一單元,而將不合格的工件推送至廢料槽。
8、RFID系統(tǒng)單元
RFID系統(tǒng)單元是一種非接觸式的自動(dòng)識(shí)別系統(tǒng),它通過(guò)射頻無(wú)線(xiàn)信號(hào)自動(dòng)識(shí)別目標(biāo)對(duì)象,用于對(duì)工件材料的信息記錄,加工路徑記錄、產(chǎn)品追溯化管理,由RFID標(biāo)簽和RFID讀寫(xiě)器組成,標(biāo)簽安裝在工件放置的工裝板上-記錄該工裝板上放置零件信息,RFID讀寫(xiě)器安裝在工裝板經(jīng)過(guò)的每一個(gè)工位上,當(dāng)工件到達(dá)該工位時(shí)系統(tǒng)可通過(guò)讀寫(xiě)器,識(shí)別到該工件的運(yùn)輸及加工途徑。每個(gè)傳輸工裝板上都安裝有RFID標(biāo)簽,在每個(gè)加工工位物料都需要進(jìn)行識(shí)讀操作,并將信息通過(guò)網(wǎng)絡(luò)傳輸給服務(wù)器,實(shí)時(shí)的跟蹤物料位置信息和倉(cāng)儲(chǔ)位置信息,做到物料、成品、半成品的可追溯性管理。
9、AGV小車(chē)搬運(yùn)單元
AGV小車(chē)無(wú)人搬運(yùn)車(chē)由機(jī)器人輸送加工后的零件或從庫(kù)房特定庫(kù)架抓取零件,AGV智能小車(chē)并依據(jù)方位計(jì)劃運(yùn)動(dòng)途徑,運(yùn)行至裝卸站,準(zhǔn)停,主動(dòng)將零件放置到裝卸站緩沖區(qū),由四軸坐標(biāo)機(jī)器人卸貨至立體倉(cāng)庫(kù)成品區(qū)或原材料區(qū)。實(shí)現(xiàn)線(xiàn)邊設(shè)備和自動(dòng)倉(cāng)儲(chǔ)的自動(dòng)上下料功能,采用激光通訊傳感器通訊,信號(hào)傳輸快捷方便;行走模組采用PLC控制,AGV的PLC通訊,PLC發(fā)送任務(wù)碼給機(jī)器人,實(shí)現(xiàn)點(diǎn)位控制;主控通訊,AGV整體與主控PLC通訊。
10、PLC工作站單元
采用工業(yè)自動(dòng)化主流PLC,可隨意擴(kuò)展,配備觸摸屏、具備物聯(lián)網(wǎng)接口,鋁合金型材構(gòu)成,連接牢固。
11、總控臺(tái)
總控平臺(tái)主要由單相電網(wǎng)電壓指示、電源控制部分、控制主機(jī)、狀態(tài)指示燈、10.4英寸工業(yè)彩色觸摸屏S7-315主機(jī),電腦等組成,主要完成監(jiān)視各分站的工作狀態(tài)并協(xié)調(diào)各站運(yùn)行,完成工業(yè)控制網(wǎng)絡(luò)的集成。它帶有電源總控制系統(tǒng)、視頻監(jiān)控系統(tǒng),產(chǎn)線(xiàn)處的有數(shù)據(jù)均可從總控制臺(tái)收集獲取,可通過(guò)總控調(diào)度分配各個(gè)模塊的工作職能。電源系統(tǒng)實(shí)施強(qiáng)弱電分開(kāi)管理,待機(jī)休息及檢修時(shí)要求強(qiáng)電關(guān)閉,控制、信號(hào)燈弱點(diǎn)部分完全獨(dú)立運(yùn)行。
12、零部件周轉(zhuǎn)拖盤(pán)
用于原材料及成品件的輸送周轉(zhuǎn)用,配合RFID系統(tǒng)及智能倉(cāng)庫(kù)、環(huán)型流水線(xiàn)中應(yīng)用。實(shí)現(xiàn)送料,取料,輸送周轉(zhuǎn)功能;實(shí)現(xiàn)智能化工作與管理,并對(duì)每個(gè)環(huán)節(jié)的時(shí)間點(diǎn)、責(zé)任人等關(guān)鍵數(shù)據(jù)進(jìn)行實(shí)時(shí)采集,匯集到統(tǒng)一的信息平臺(tái),最大限度的提高存儲(chǔ)貨物的能力。
















© 廣東育菁裝備有限公司| All Rights Reserved | 粵ICP備17022107號(hào)-1